micro:bitとスライド抵抗でサーボモーターを操作してみよう
電気を流れにくくする部品 – 抵抗
スライド抵抗(スライドボリューム、すべり抵抗器)とは、抵抗値を変えられる「可変抵抗器」の1種で、つまみを左右にスライドさせることで端子間の抵抗値を変えることができます。
抵抗は、電気を流れにくくする部品で、抵抗が大きいほど電気が流れにくくなります。
可変抵抗器(読み)カヘンテイコウキ|コトバンク
抵抗線を巻いたコイル上を接触片が移動して接点を変え、抵抗値を加減することのできる抵抗器。電流・電圧調節に用いる。
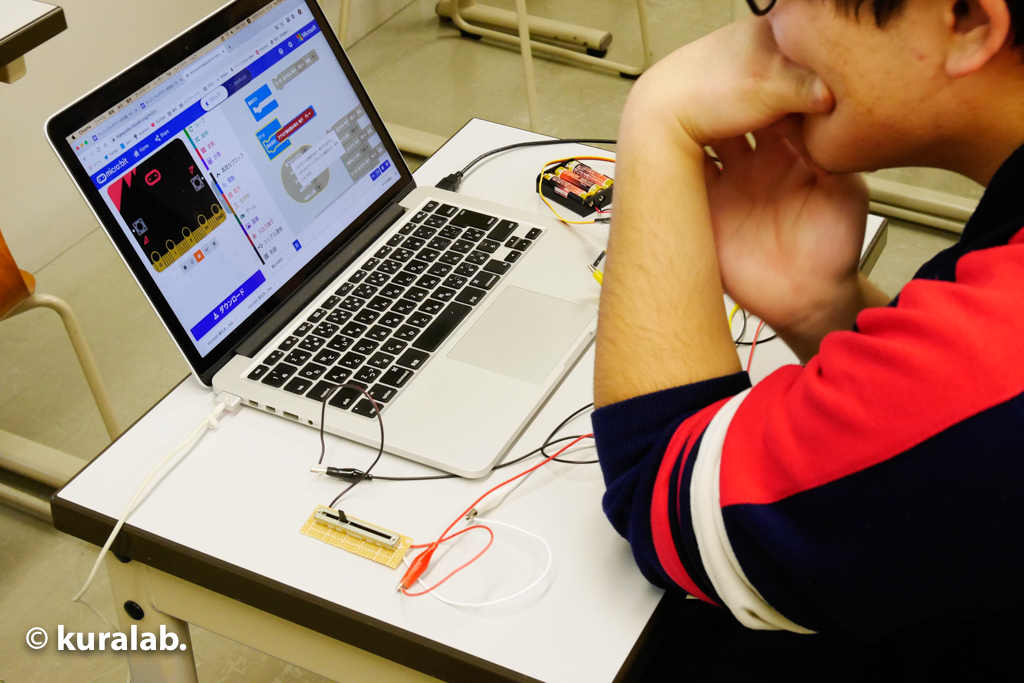
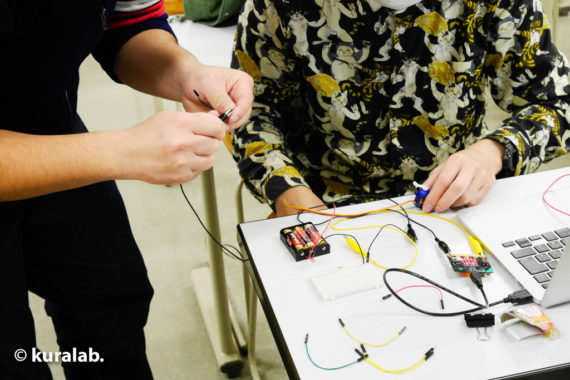
micro:bitとスライド抵抗を接続
スライド抵抗からは、電源(+)、GND、出力(OUT)の3本の線が出ています。
この出力の値を使って、サーボモーターの角度をコントロールしようと思います。
スライド抵抗をmicro:bitに接続すると、スライド抵抗の出力から得られる値は1〜1023と表示されました。
サーボモーターの角度を操作する
模型用サーボモーターはPWM信号で0〜180度の角度を制御できます。
サーボモーターからは、電源(+)、GND、制御信号(PWM)3本の線が出ています。
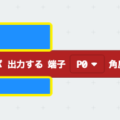
micro:bitのプログラムで、サーボモーターの角度の値に、アナログ入力から得た値を代入して角度に変換します。
0〜1023の値を0〜180度に変換するには、得られた値に1023を180で割った比をかければいいですね。
スライド抵抗のつまみを左右に動かすと、サーボモータの動きが同期します。
コメントなどございましたら、こちらのFBの記事にお願いしま~す。